Ya que tenemos todos los elementos de la electrónica conectados, ahora podemos pasar a cargarle el firmware definitivo a nuestra impresora, este firmware va a ser el Marlin. El Marlin, no lo hemos cargado antes, porque de haberlo hecho, no habríamos sido capaces de mover los motores para ajustar los pololus, ya que si Marlin no detecta que la temperatura del HotEnd es la adecuada o simplemente no detecta el sensor, no nos va a dejar extruir.
Ahora, como ya tenemos todo conectado, le vamos a cargar el Marlin, para ello vamos a necesitar el entorno de programación de Arduino en una versión más actual (yo voy a usar la versión 1.0.5), vosotros podéis descargaros la versión más actual desde la página oficial de Arduino. También vamos a necesitar el Marln, yo voy a usar una versión ya testada que funciona perfectamente y que vosotros podéis descargar en el enlace que hay a continuación.
Descarga del Marlin usado en el tutorial aquí.
Actualizado Julio 2018: La versión de Marlin que se usa en este tutorial funciona perfectamente, pero es una versión antigua, si usáis una electrónica creada con posterioridad al 2016 es probable que no podáis configurarla con la versión de la WEB, para eso bajad la última versión de Marlin aqui
Una vez que tengáis tanto el entorno de Arduino en una versión actual como el Marlin, lo descomprimís y seguís estos pasos:
Abrir el entorno de Arduino, conectad la electrónica y seleccionar tanto la tarjeta que estáis usando (Arduino Mega) como el puerto al que está conectado.

Una vez configurada la tarjeta y el puerto, vamos a abrir el Marlin, para ello en la barra de herramientas le damos a archivo/abrir.... y dentro de la carpeta que hemos descargado con el Marlin, vamos a encontrar un archivo que se llama "marlin.ino", lo abrimos y aparecerá una nueva ventana.

Al igual que hacíamos con "Sprinter", tenemos que ir a la pestaña de configuración, que es donde vamos a encontrar todos los parámetros que debemos de configurar.
Los primeros parámetros que nos vamos a encontrar van a ser el tipo de placa que tenemos y el numero de extrusores de nuestra máquina, en mi caso, como estoy usando una RAMP's 1.4 tendré que asignarle el número 33 (que es el numero que me indica la lista de tarjetas), y en el numero de extrusores le pondré "1", ya que mi maquina tan solo cuenta con 1 extrusor.

Más abajo nos encontraremos parámetros relacionados tanto con los termistores como con la temperatura, en el parámetro de pone "#define TEMP_SENSOR", tenemos que indicarle que tipo de sensor estamos usando, en mi caso estoy usando un termistor de 100K, por lo que tengo que asignarle el numero "1", como veis, hay posibilidad de asignar hasta 3 tipos de sensores para 3 posibles HotEnds, (en mi caso como solo tengo un HotEnd con un termistor, tan solo es necesario que configure el primero. Seguido a este parámetro, podemos ver otro que pone "#define TEMP_SENSOR_BED", que será el que defina el tipo de termistor que usamos en la cama caliente.

Un parámetro que debemos conocer es el "#define HEATER_MINTEMP", este es un parámetro que no alteraremos, pero hay que saber lo que hace, y es que si intentamos calentar tanto el HotEnd como la cama calietne cuando el sensor registra una temperatura inferior a la que indica aquí, la impresora nos va a dar un error que dirá "ERROR_MIN_TEMP", y no calentará, por ello la habitación o entorno donde este la impresora deberá de estar a una temperatura mayor que la que aquí aparece.
Otro parámetro MUY IMPORTANTE referente a la temperatura, es el que va a fijar el límite de temperatura tanto del HotEnd como de la cama caliente. el de la cama quizás no sea muy relevante, pero el del HotEnd si, ya que si tenemos un HotEnd que no sea "All Metal", y superamos los 250º, es muy posible que fundamos alguna de las partes del propio HotEnd, por ello hay que ponerle un límite.
Yo os diría que si vuestro HotEnd no es "All Metral", fijéis este límite entre 250-260⁰, y si es totalmente metálico lo pongáis en 300⁰.

Si seguimos bajando, nos vamos a encontrar otro parámetro que nos va a definir la temperatura mínima de extrusión, "#define EXTRUDE_MINTEMP", este es un parámetro de seguridad, que va a impedir que extruyamos nada si el HotEnd no está a la temperatura que indicamos aquí, esto se hace para proteger el extrusor e impedir extruir en frio.

Los siguientes parámetros a configurar hacen referencia a los finales de carrera y a el movimiento de los ejes, si habéis hecho el montaje de vuestra impresora de la misma manera que lo he hecho yo, lo valores que tendréis que poner son los que aparecen en la imagen. Los primeros parámetros activan las resistencias de "PullUp", necesarias si trabajáis con los finales de carrera entre señal y GND, el siguiente grupo de parámetros bloquean o no los ejes cuando se mueven, haciendo que permanezcan en la posición que se le ordena, y los últimos parámetros invierten el movimiento de los ejes, aunque yo os diría que este último parámetro no lo modifiquéis, simplemente, si el eje se mueve en la dirección incorrecta dadle la vuelta al cable.

Los últimos valores que vamos a configurar antes de cargar el firmware, son los que veis en la imagen inferior, el primero va a delimitar el área de impresión, y el segundo (valor que ya habíamos visto en el Sprinter) va a configurar los pasos que deben de dar los motores para moverse una unidad.
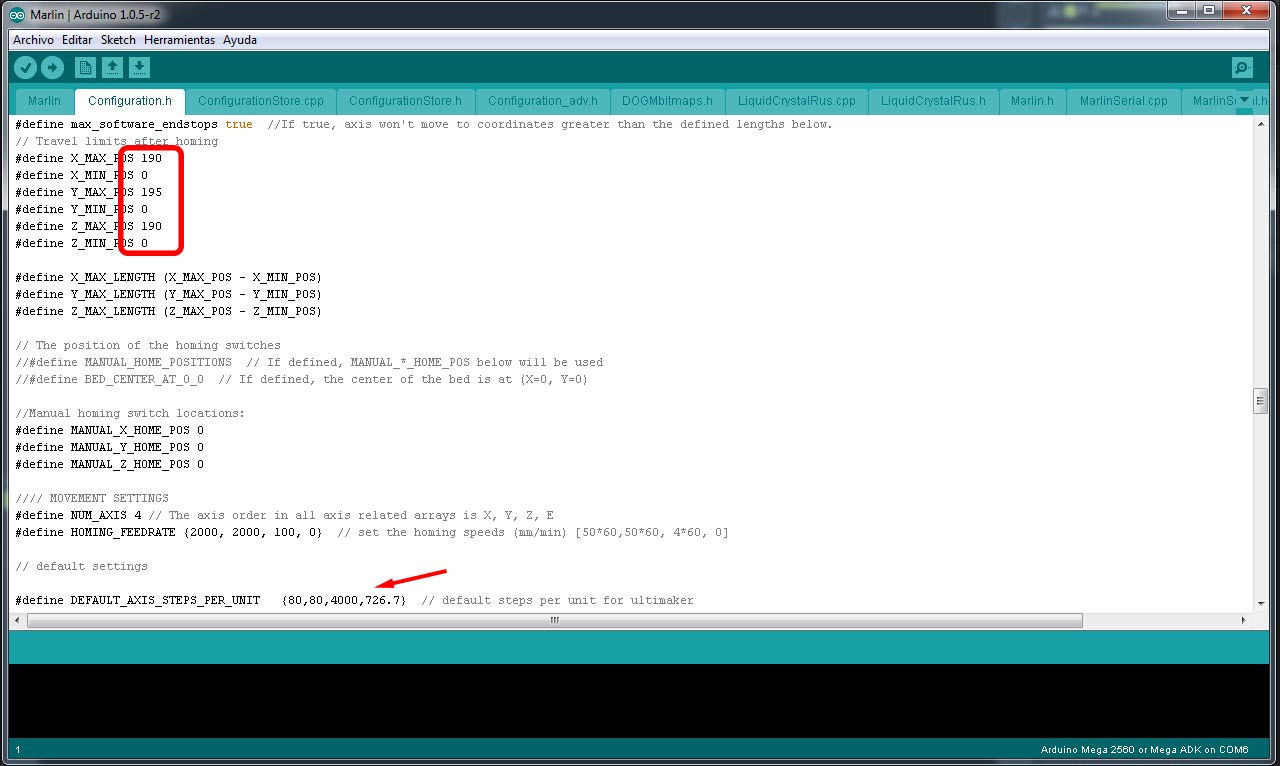
Para configurar el primer valor es tan sencillo como medir físicamente el recorrido de los ejes, desde que tocan el final de carrera, hasta el otro extremo (restarle unos milímetros para no apurar demasiado).
Para configurar los pasos por milímetro de los motores, lo haremos de forma similar a como lo hicimos con el extrusor, pudiendo directamente poner el valor que obtuvimos con anterioridad a la hora de calibrar el extrusor.
Para el eje Z, los pasos por milímetro van a depender de los pasos del motor, la resolución que le indiquemos a los pololus con los "jumpers" y el paso de rosca de la varilla.
La fórmula que debéis de seguir será la siguiente:
Pasos_por_mm = Pasos_del_motor_por_vuelta x Micro_pasos_del_pololu / paso_varilla
Si usáis un motor del tipo NEMA 17, tendrá 200 pasos por vuelta, la resolución del pololu o micro pasos del pololu con los 4 "jumpers" será de 16 y los pasos de una varilla de métrica 5 es de 0.8mm, por lo que el resultado de la ecuación es:
Pasos_por_mm = 200 x 16 / 0.8 = 4000
Que es el valor que tendréis que poner si usáis estos elementos, si vuestra varilla es de métrica 8, entonces el valor que pondréis será el de 2560.
Para el Eje X e Y, vamos a abrir el Pronterface, le diremos que se mueva 100mm, y mediremos la distancia real que se ha movido, el valor que nos dé, se lo vamos a dividir al valor que aparece en la casilla del eje X o Y (esta por defecto en 80) y lo multiplicaremos por el valor que le hemos ordenado moverse, dando como resultado el numero que debemos de colocar en la configuración de estos ejes.
Configuración del PID
>El PID es un controlador que está programado en el propio Arduino y que debemos de configurar para que la regulación de la temperatura sea lo más precisa posible, para ello vamos a abrir el Pronterface y vamos a ejecutar el comando "m303" (escribiendo este comando directamente sobre la consola del pronterface y dándole a ejecutar).

Una vez lo ejecutemos, veremos cómo empieza a subir la temperatura del HotEnd y de manera automática el programa empezará a activar y desactivar la alimentación viendo cómo evoluciona la temperatura. De esta forma el programa va a comprobar la inercia térmica de nuestro HotEnd y después de un rato, nos va a dar unos valores ( Kp, Ki y Kd), estos valores son los que debemos de poner en el firmware para asegurarnos que nuestro HotEnd calienta de manera adecuada y no sufre oscilaciones de temperatura demasiado acusadas.

 Video resumen
Video resumen

Comentarios potenciados por CComment